 |
|
element of a vector x(t) in a system with the differential equations
| state equation |
| output equation, |
and for linear systems
| state equation |
| output equation, |
from which for known initial values of the vector elements at any given instant t0 (often with t0 = 0) and known course of the elements of the input vector u(t) the course of the elements of the output vector v(t) may be calculated starting at t0 SEE: Figure 3. Note 1 to entry: In case of discrete-time variables the describing equations are
| xi+1 = f (xi, ui) | state equation |
| vi = g (xi, ui) | output equation, |
and for linear systems
| xi+1 = Φ·xi + H·ui | state equation |
| vi = C·xi + D·ui | output equation. |
Note 2 to entry: This entry was numbered 351-21-08 in IEC 60050-351:2006. |
|
|
|
élément d'un vecteur x(t) dans un système d'équations différentielles
| équation d'état |
| équation de sortie, |
et pour les systèmes linéaires
| équation d'état |
| équation de sortie, |
à partir desquelles la course des éléments du vecteur de sortie v(t) peut être calculée, avec des valeurs initiales connues des éléments du vecteur x(t) à tout instant t0 (souvent avec t0 = 0), avec une course connue des éléments du vecteur d’entrée u(t), et en partant de t0 VOIR: Figure 3. Note 1 à l'article: En cas de variables à temps discret, les équations sont les suivantes:
| xi+1 = f (xi, ui) | équation d'état |
| vi = g (xi, ui) | équation de sortie, |
et pour les systèmes linéaires
| xi+1 = Φ·xi + H·ui | équation d'état |
| vi = C·xi + D·ui | équation de sortie. |
Note 2 à l'article: Cet article était numéroté 351-21-08 dans la CEI 60050-351:2006. 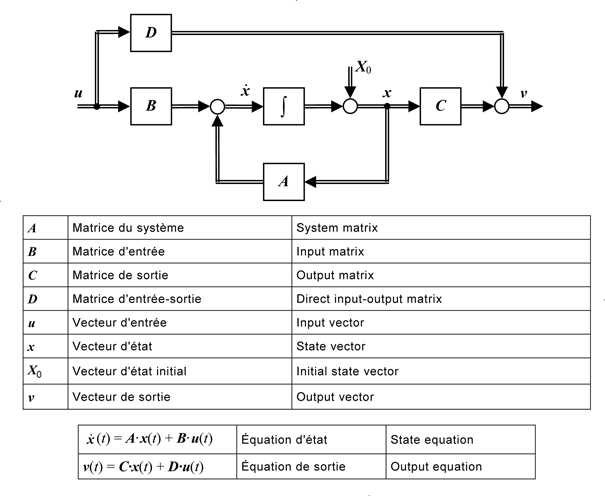
Figure 3 – Linear transfer system with state variables Figure 3 – Système de transfert linéaire avec variables d'état |
|